首先测试一下普通的 Arduino UNO 的采样速度
// the setup routine runs once when you press reset:
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
analogReference(INTERNAL); //调用板载1.1V基准源
}
void loop() {
int i;
float voltage;
int sensorValue;
unsigned long elsp=millis();
for (i=0;i<10000;i++)
{
// read the input on analog pin 0:
sensorValue = analogRead(A0);
}
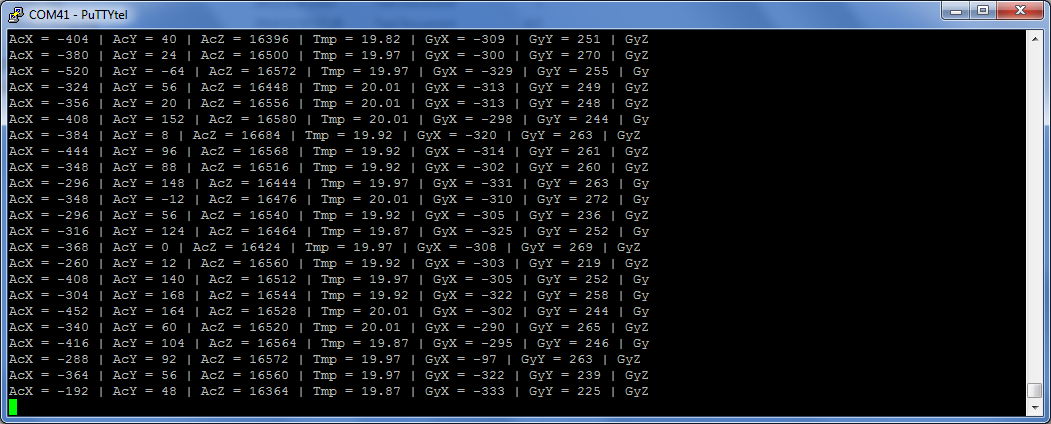
Serial.println(millis()-elsp);
delay(10000);
}
运行结果是 1120 左右,就是说采样10000次用时1.12s,采样频率大约是 8928.57Hz (次/秒)。
找了一段代码【参考6】能够提高采样速度
// defines for setting and clearing register bits #ifndef cbi #define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit)) #endif #ifndef sbi #define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit)) #endif
写个程序测试一下
// the setup routine runs once when you press reset:
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
analogReference(INTERNAL); //调用板载1.1V基准源
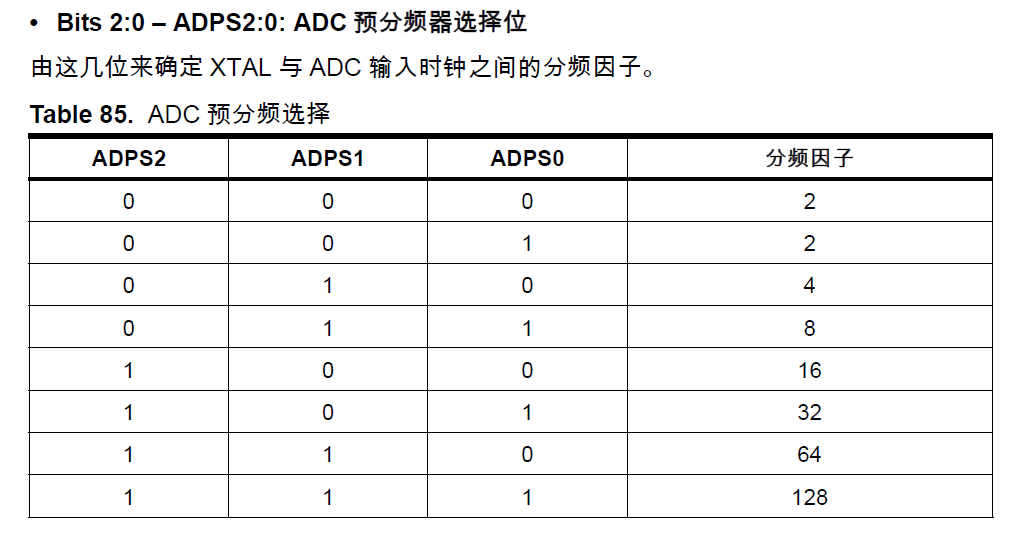
// set prescale to 16
sbi(ADCSRA,ADPS2) ;
cbi(ADCSRA,ADPS1) ;
cbi(ADCSRA,ADPS0) ;
}
void loop() {
int i;
float voltage;
int sensorValue;
unsigned long elsp=millis();
for (i=0;i<10000;i++)
{
// read the input on analog pin 0:
sensorValue = analogRead(A0);
}
Serial.println(millis()-elsp);
delay(10000);
}
运行输出结果在 170 左右,就是说采样10000次用时0.170s,采样频率大约是 58823.53Hz (次/秒)。
原理上来说Arduino 的 ADC 是用一种逐次逼近比较的方法来进行ADC转换的。通俗的说就是内部有一个比较器,每次内部升高一个电压和外部指定的Pin进行比较,根据大于小于来判定外部指定脚上的电压。资料说做这样一个比较大约需要10次,13个机器周期。而比较的频率是主控频率分频给出来的,有一个分频因子,默认是128,分频因子越小,比较的速度也就越快。
这里只是简单说一下,如果想了解ADC具体的工作原理,请阅读参考中提到的文章。
多说两句批评一下《Arduino技术内幕》这本书,刚开始我是阅读这本书来学习Arduino ADC的,但是阅读的时候感觉一直在外面游荡,不知道是原作者不懂还是翻译的人不明白,反正这一章的介绍让我一头雾水。
参考:
1. http://www.geek-workshop.com/thread-1848-1-1.html Arduino入门教程–第十七课–使用内部基准源进行ADC采样
2. 冷知识-这次讲ADC采样率-11月8号更新-上传高速率采样库-后续加入示波器库
http://www.geek-workshop.com/thread-11511-1-1.html
3. http://apcmag.com/arduino-analog-to-digital-converter-how-it-works.htm/ 介绍 Arduino ADC 如何工作
4. http://www.microsmart.co.za/technical/2014/03/01/advanced-arduino-adc/
5. http://wenku.baidu.com/link?url=I3DA7sWeIOxPntLf89u_MO8V30InxZlEWzDu7BxsXPQlJtprgkzUsdQmIEiBPSOBrdq1_iccg-qxxkOh1ROvfz3C9vbt55Axy_f1JAFZJTq 基于Arduino的音乐频谱显示器方案概述
6. http://forum.arduino.cc/index.php?topic=6549.0
7. http://meettechniek.info/embedded/arduino-analog.html Arduino: Analog measurements