前面介绍了使用 ESP32 S3 播放 SPINOR 中的内容,美中不足的是 SPI 容量有限无法播放长视频。这次的作品能够实现读取和发送SD卡中的JPG 图片,从而实现长时间的播放。
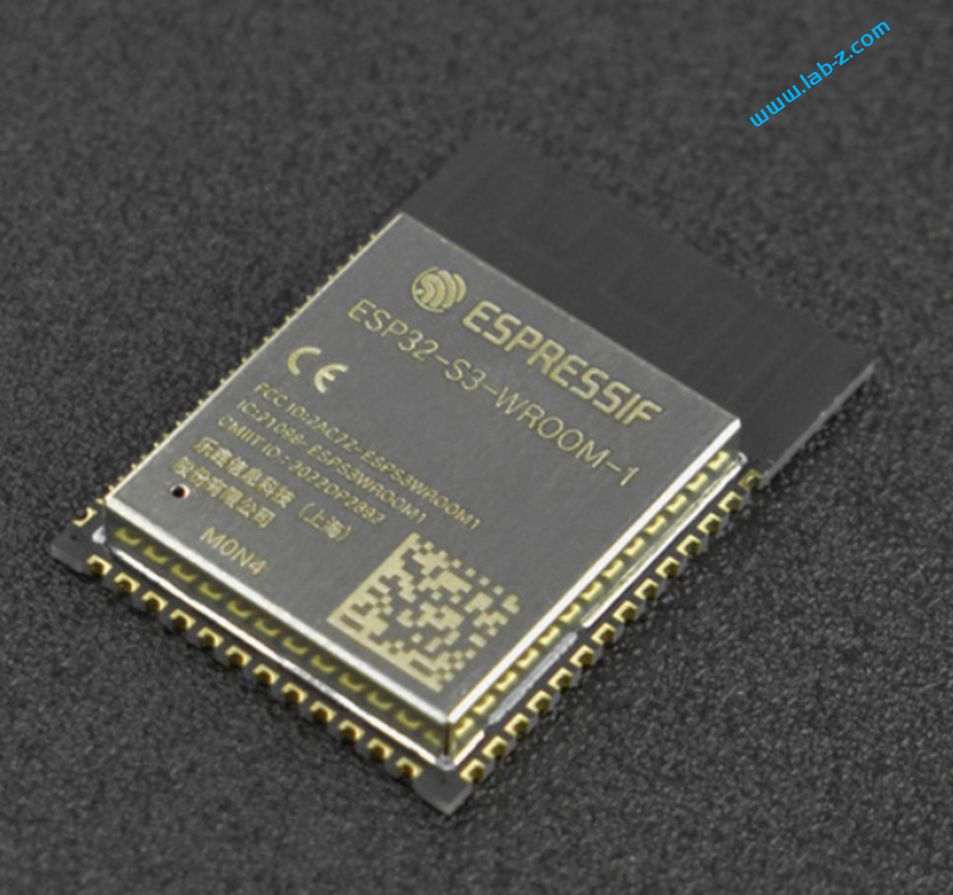
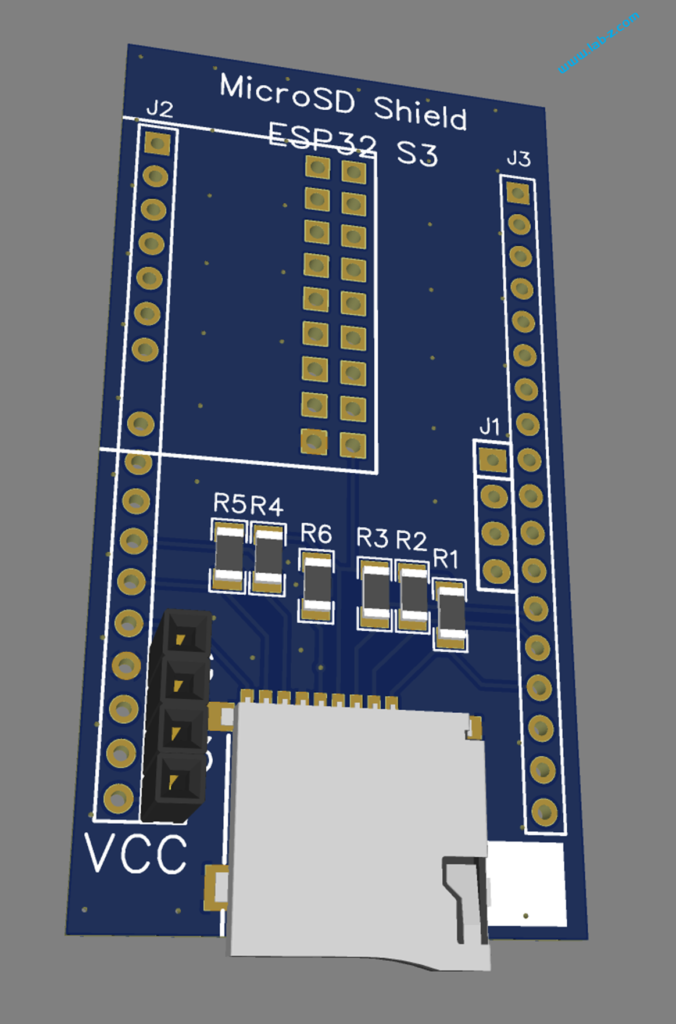
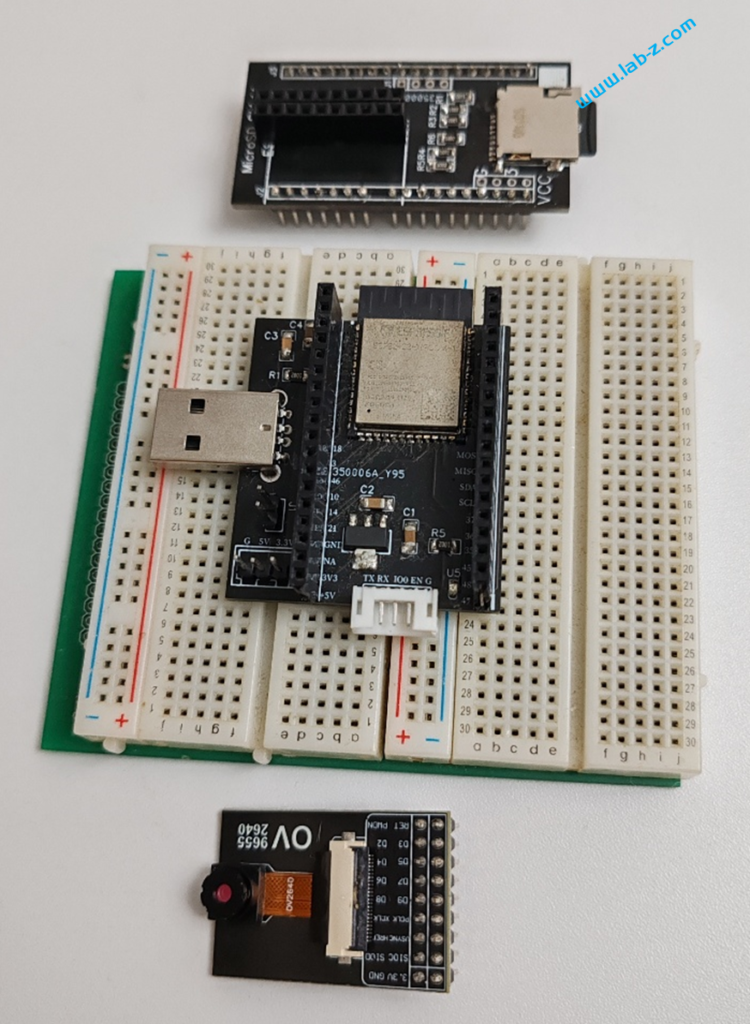
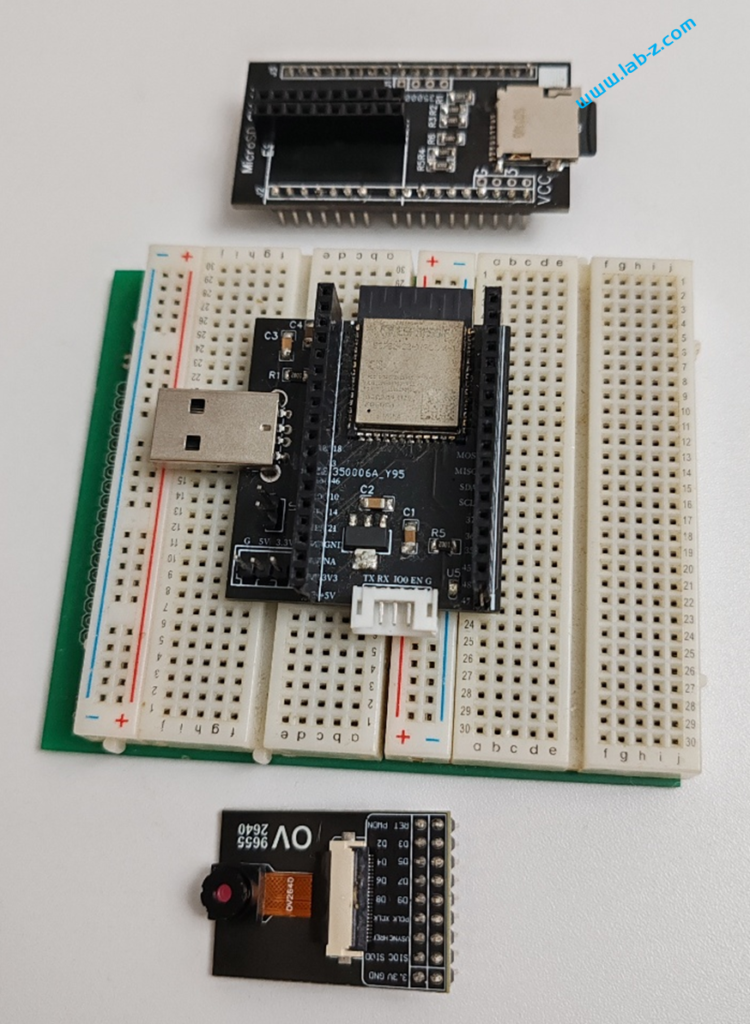
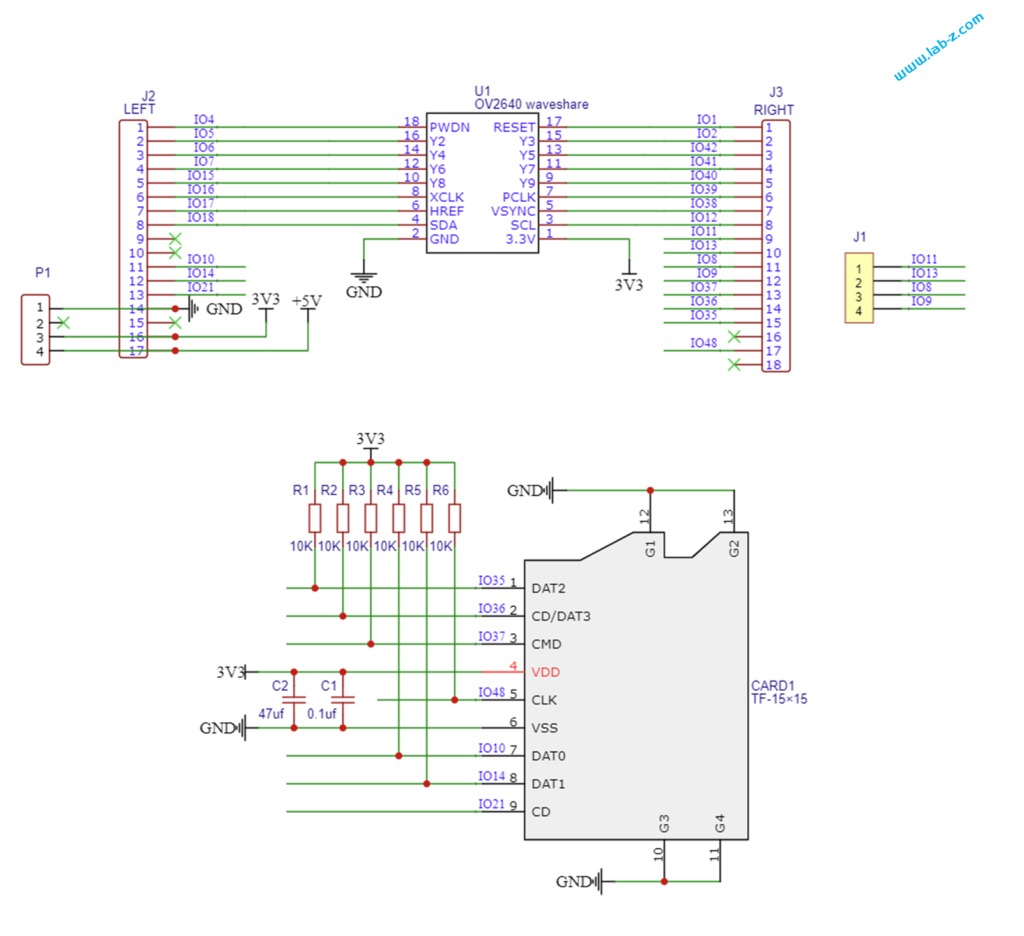
实验是基于DFRobot 的ESP32-S3-WROOM-1-N4模组(DFR0896)【参考1】来实现的,需要注意的是:这个模组没有 PSRAM,项目中需要关闭PSRAM。为了读取 SD 卡,需要使用上一次设计的 OV2640 Shield,其中的 SD 卡是4线模式。
插入SD卡,板子堆叠起来即可工作。接下来着手代码设计。
和之前相比,代码改动较大,主要修改有:
- 去掉了 LVGL模块和One Button 模块,这样帮助减小代码体积和内存的占用;
- 添加了SD 卡初始化代码:
// By default, SD card frequency is initialized to SDMMC_FREQ_DEFAULT (20MHz)
// For setting a specific frequency, use host.max_freq_khz (range 400kHz - 40MHz for SDMMC)
// Example: for fixed frequency of 10MHz, use host.max_freq_khz = 10000;
sdmmc_host_t host = SDMMC_HOST_DEFAULT();
host.max_freq_khz = 20000;
// This initializes the slot without card detect (CD) and write protect (WP) signals.
// Modify slot_config.gpio_cd and slot_config.gpio_wp if your board has these signals.
sdmmc_slot_config_t slot_config = SDMMC_SLOT_CONFIG_DEFAULT();
slot_config.width = 4;
// On chips where the GPIOs used for SD card can be configured, set them in
// the slot_config structure:
//ZivDebug_Start
slot_config.clk = 48;
slot_config.cmd = 37;
slot_config.d0 = 10;
slot_config.d1 = 14;
slot_config.d2 = 35;
slot_config.d3 = 36;
//ZivDebug_End
主要是指定工作频率为 20Mhz (如果你发现读取的时候会出错,不妨尝试降低这个频率);工作模式为4线;另外指定了使用的SD 信号控制线和数据线。
3.接下来,我们修改之前 camera_fb_get_cb() 函数中访问 SPI 的代码,修改为访问SD 卡
char buffer[64];
struct stat file_stat;
int filesize;
FILE *fd = NULL;
sprintf(buffer,MOUNT_POINT"/m/%04d.jpg",PicIndex);
ESP_LOGI(TAG, "p1 %s %d",buffer,PicIndex);
if (stat(buffer, &file_stat) == -1) {
ESP_LOGI(TAG, "%d frame in %llums",
PicIndex,
(esp_timer_get_time()/1000-Elsp));
Elsp=esp_timer_get_time()/1000;
PicIndex=0;
sprintf(buffer,MOUNT_POINT"/m/%04d.jpg",PicIndex);
} else {PicIndex++;}
fd = fopen(buffer, "r");
fseek(fd, 0, SEEK_END);
filesize = ftell(fd);
rewind(fd);
ESP_LOGI(TAG, "send %d",filesize);
fread(&PicBuffer, 1, filesize, fd);
s_fb.uvc_fb.buf = PicBuffer;
s_fb.uvc_fb.len=filesize;
fclose(fd);
基本思路是:尝试访问 m\NNNN.jpg 这样的文件,如果文件存在,那么取得他的大小,如果该文件不存在,说明最后一帧处理完成需要从第一张再开始。之后将文件内容读取到PicBuffer作为返回值返回给调用者。
目前测试的是 320X240 的内容,速度上完全没有问题。
参考: